
Stephan van Vuren
Série de Conhecimento AirHub: SORA Passo 2: Determinação da Classe de Risco Intrínseco no Solo (iGRC)

AirHub Série de Conhecimento — Construindo sobre nosso blog anterior sobre o Passo 1 do SORA, onde exploramos o Conceito de Operações (ConOps) e como ele forma a base do planejamento operacional de UAS, agora avançamos para o próximo passo crítico. A Avaliação de Risco de Operações Específicas (SORA) metodologia fornece uma abordagem estruturada para avaliar riscos nas operações de Sistemas de Aeronaves Não Tripuladas (UAS). O Passo 2 do processo SORA, determinar a Classe de Risco Intrínseco no Solo (iGRC), é essencial para avaliar o potencial de risco que uma operação de UAS representa para pessoas e propriedades no solo. Este passo estabelece a base para identificar mitigações necessárias e moldar operações seguras e em conformidade.
O que é a Classe de Risco Intrínseco no Solo (iGRC)?
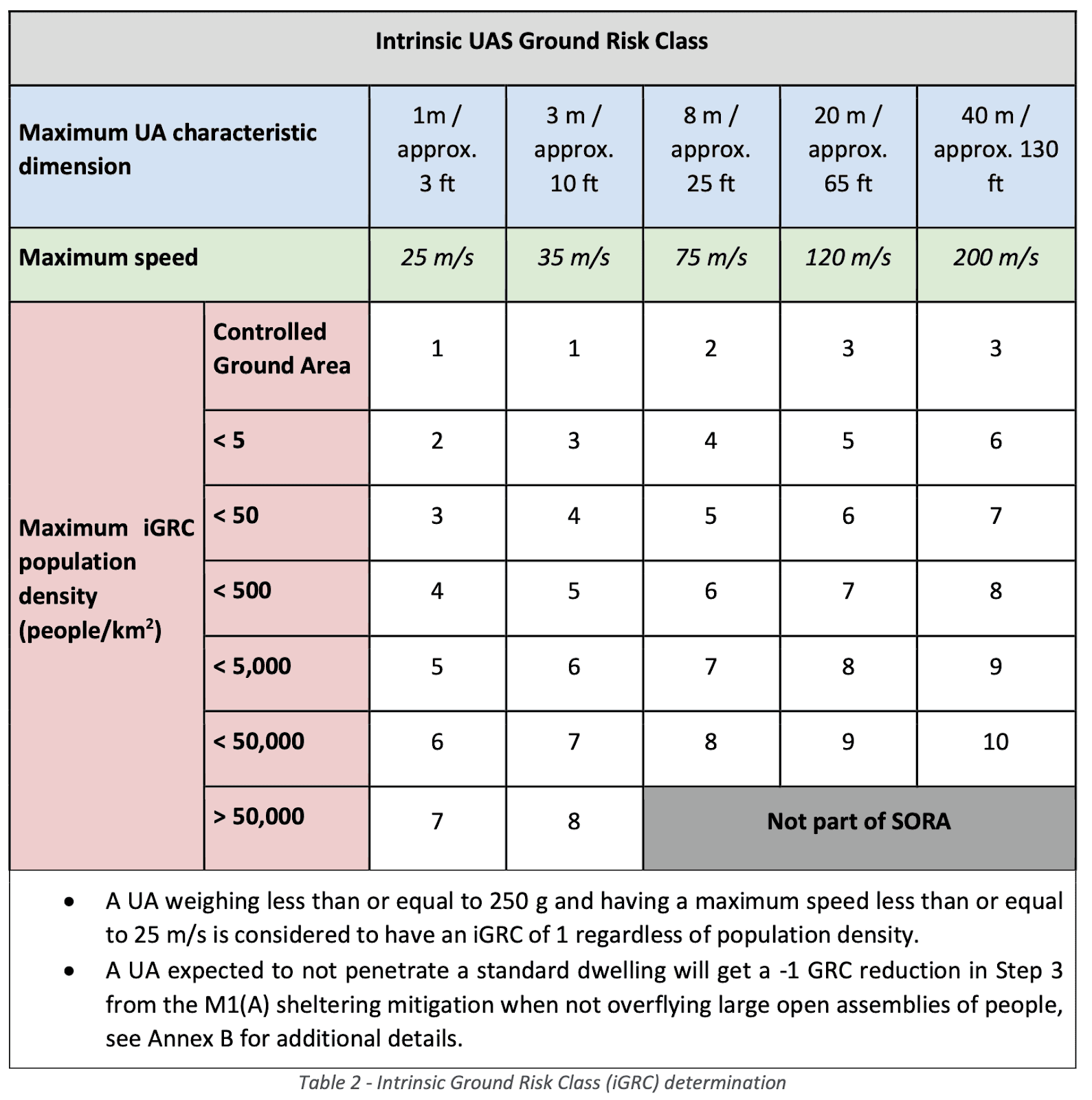
A Classe de Risco Intrínseco no Solo (iGRC) é um valor numérico (variando de 1 a 10) que reflete o nível de risco básico representado por uma operação de UAS para pessoas e infraestrutura no solo antes de quaisquer mitigações serem aplicadas. O iGRC é determinado com base em:
Características Físicas do UAS:
Dimensão característica máxima (por exemplo, envergadura para aeronaves de asa fixa, diâmetro da lâmina para aeronaves rotator, ou distância máxima entre pontas de lâminas para multi-rotor).
Velocidade máxima no impacto (a maior velocidade de ar possível comandada, conforme definido pelo fabricante).
Ambiente Operacional:
Densidade populacional dentro do volume operacional e a zona de risco terrestre circundante.
Se o voo ocorre sobre áreas pouco povoadas, povoadas ou densamente povoadas.
Entender o iGRC é crucial, pois estabelece o risco básico antes de aplicar quaisquer mitigações. Esta classificação é uma entrada chave nos passos subsequentes do SORA.
Visualizando o Risco Terrestre
O iGRC também é representado graficamente para ajudar a visualizar a pegada de risco de uma operação de UAS.
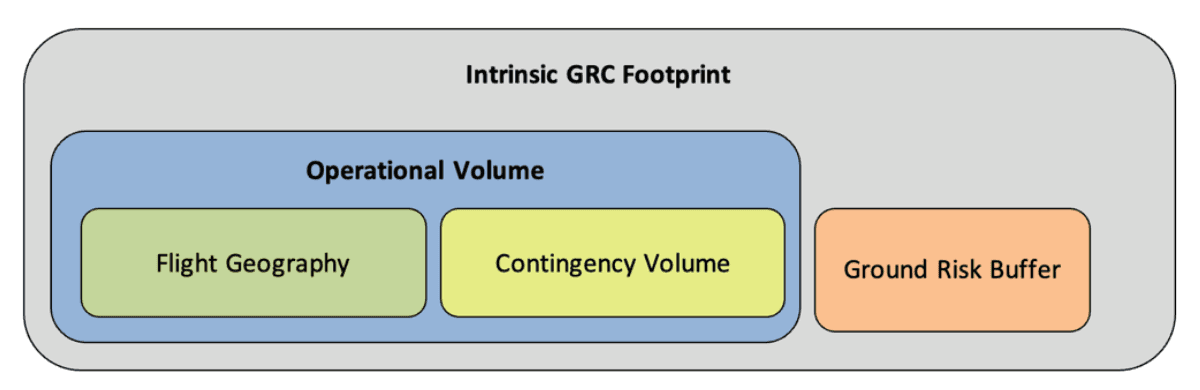
Esta figura destaca como diferentes ambientes operacionais influenciam a classificação de risco e as potenciais zonas de impacto de um UAS descontrolado.
Determinando o iGRC
O iGRC é determinado por meio de um processo estruturado que avalia tanto a pegada operacional quanto os fatores ambientais:
1. Identificando a Pegada do iGRC
Geografia do voo: Defina a área onde o UAS é esperado operar em condições normais.
Volume de contingência: Calcule o volume adicional de espaço aéreo que leva em conta desvios potenciais de trajetórias de voo planejadas.
Buffer inicial de risco no solo: Estabeleça um buffer de segurança inicial (o buffer final de risco no solo será determinado no Passo #8 do SORA).
Análise da densidade populacional: Identifique a maior densidade populacional dentro da pegada do iGRC. Se múltiplos segmentos do voo passarem por áreas com densidades populacionais variadas, o segmento com a densidade mais alta deve ser utilizado.
2. Avaliando as Características Físicas do UAS
Dimensão Característica Máxima:
UAS de Asa Fixa: Meça a envergadura.
Rotorcraft: Meça o diâmetro da lâmina.
Multi-rotor: Meça a distância máxima entre pontas de lâminas.
Considerações sobre a Velocidade Máxima:
Definida como a maior velocidade de ar possível comandada do UA, conforme especificado pelo fabricante.
Não limitada à velocidade máxima específica da missão, já que reduções operacionais podem não necessariamente reduzir a área de impacto.
Mitigações de redução de velocidade, que limitam a velocidade de impacto, podem ser consideradas no Passo #3 do processo SORA (Anexo B do SORA).
3. Avaliação da Densidade Populacional e Risco
Ferramentas de mapeamento oficiais: A densidade populacional deve ser determinada usando mapas oficialmente designados com um tamanho de grade apropriado para a operação.
Métodos alternativos: Se não existirem mapas de densidade populacional adequados, podem ser usados descritores qualitativos (veja a tabela abaixo) para estimar a densidade populacional no volume operacional e na zona de risco terrestre.
Submissão de mapas personalizados: Em certos casos, as autoridades podem permitir que os candidatos submetam seus próprios mapas de densidade populacional se as fontes oficiais forem inadequadas.
4. Ajustes nas Estimativas de Densidade Populacional
Se um candidato identificar imprecisões em um mapa estático de densidade populacional, ele pode fornecer fontes de dados alternativas como:
Outros produtos de mapeamento.
Imagens de satélite.
Inspeções no local.
Perícia local e dados históricos.
Se aprovado pela autoridade competente, essas fontes alternativas podem ser usadas para refinar os cálculos do iGRC.
Ajustes baseados no tempo: Considerações como restrições baseadas no tempo (por exemplo, voar à noite para reduzir o risco no solo) são abordadas no Passo #3 do processo SORA.
5. Métodos Alternativos para Cálculo do iGRC
Os operadores podem achar que os valores padrão de iGRC são muito conservadores para sua operação específica de UAS.
Nesses casos, um candidato pode aplicar um modelo matemático, conforme definido no Anexo F do SORA, para determinar um iGRC mais preciso.
Operações fora do escopo do SORA: Se uma operação não corresponder a uma categoria de iGRC existente (ou seja, células cinzas na tabela de referência), ela está fora do escopo do SORA e deve ser considerada sob a categoria certificada.
Como dados exatos de densidade populacional nem sempre estão disponíveis, descritores qualitativos podem ajudar a estimar a densidade de pessoas na área operacional. Essas estimativas são cruciais para atribuir o iGRC correto.
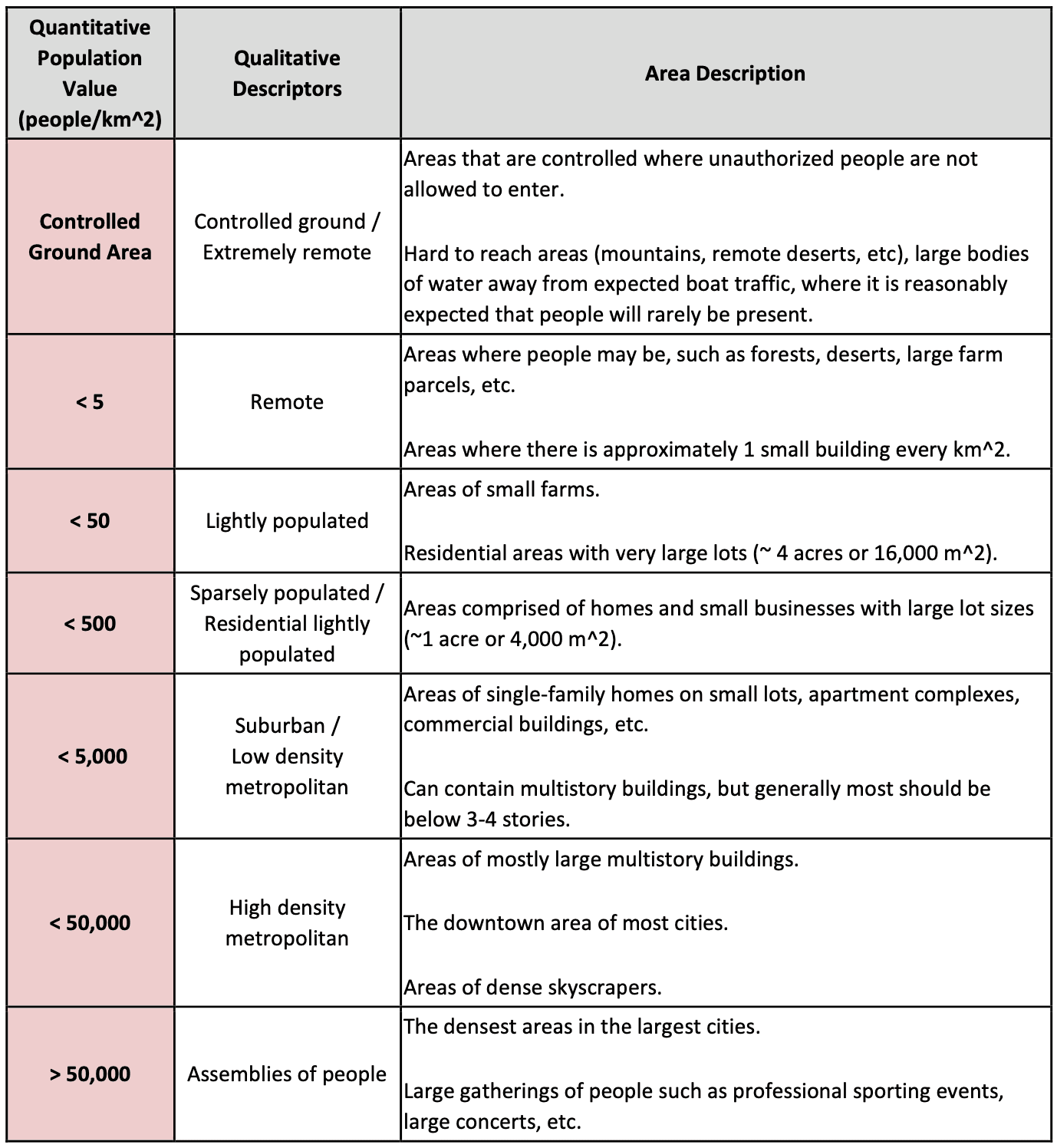
Por exemplo:
Áreas esparsas incluem locais remotos, florestas e zonas industriais com presença humana mínima.
Áreas povoadas incluem bairros suburbanos e parques com multidões ocasionais.
Áreas densamente povoadas cobrem centros de cidade, estádios e grandes aglomerações.
Ao sobrepor volumes operacionais de UAS aos mapas de densidade populacional, os operadores podem tomar decisões informadas sobre níveis de risco e mitigações necessárias.

Conclusão
O Passo 2 do processo SORA, determinar a Classe de Risco Intrínseco no Solo (iGRC), fornece a base para avaliar o impacto potencial de uma operação de UAS em pessoas e propriedade. Compreender a classificação iGRC permite que os operadores:
Identifiquem o nível de risco básico de sua operação.
Estabeleçam medidas de mitigação necessárias.
Após determinar o iGRC, mitigações estratégicas são aplicadas para reduzir o risco no solo, levando finalmente à classe de risco no solo final (GRC).
Na AirHub Consultancy, ajudamos operadores profissionais de drones a navegar pelas complexidades da avaliação de risco e conformidade regulatória. A Plataforma de Operações de Drones AirHub fornece ferramentas para determinar a densidade de pessoas no solo e identificar outros potenciais perigos, como infraestrutura crítica e Zonas de Não Voo, para melhorar a conscientização situacional e o planejamento de segurança.
Fique atento para o próximo blog em nossa série SORA, onde exploramos como aplicar mitigações para reduzir efetivamente o risco no solo.


