•
Stephan van Vuren
AirHub Knowledge Series: SORA Step 2: Determination of the Intrinsic Ground Risk Class (iGRC)

AirHub Knowledge Series — Building on our previous blog about Step 1 of SORA, where we explored the Concept of Operations (ConOps) and how it forms the foundation of UAS operational planning, we now move forward to the next critical step. The Specific Operations Risk Assessment (SORA) methodology provides a structured approach to evaluating risks in Unmanned Aircraft Systems (UAS) operations. Step 2 of the SORA process, determining the Intrinsic Ground Risk Class (iGRC), is essential for assessing the potential risk a UAS operation poses to people and property on the ground. This step lays the groundwork for identifying necessary mitigations and shaping safe, compliant operations.
What is the Intrinsic Ground Risk Class (iGRC)?
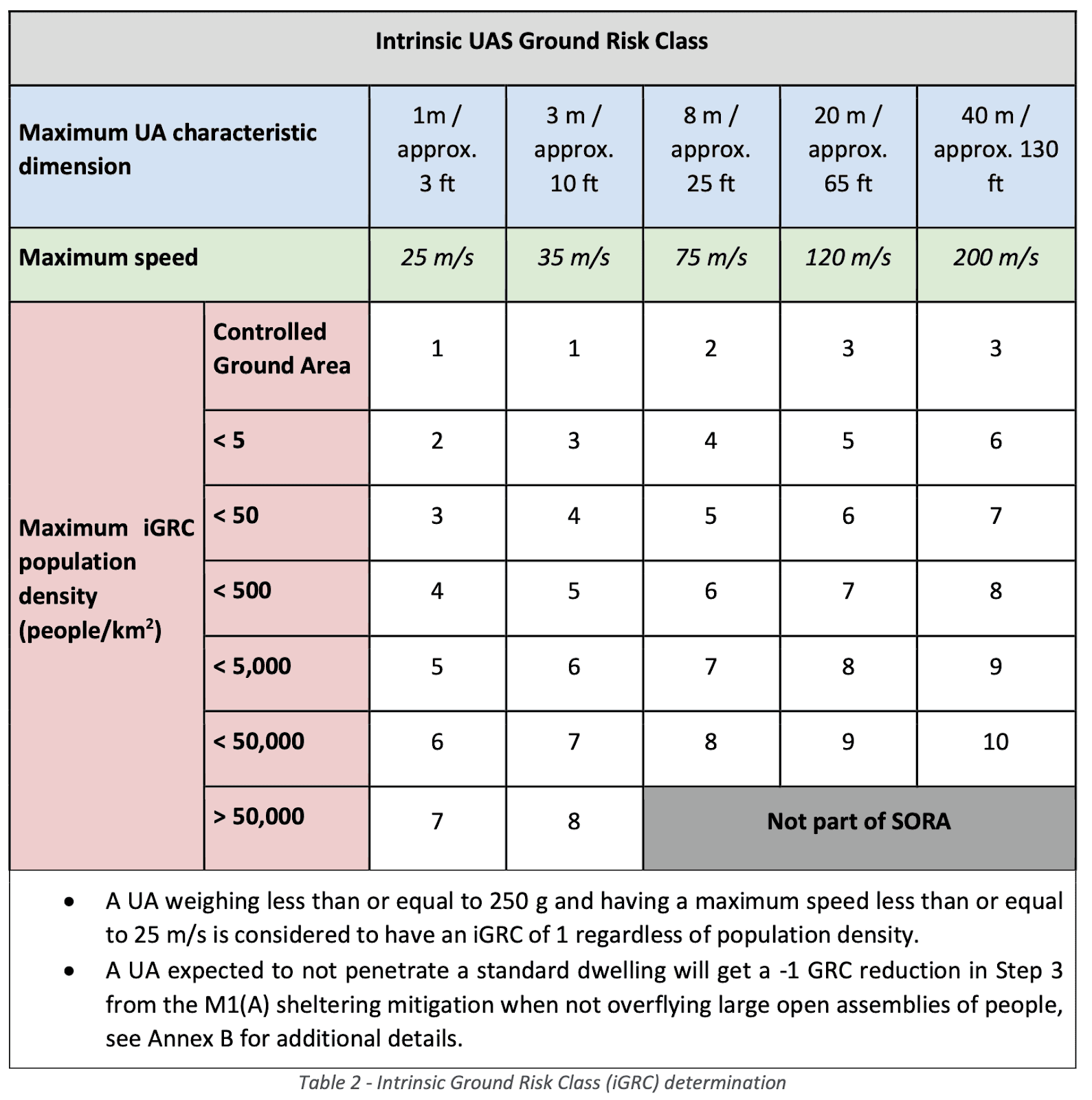
The Intrinsic Ground Risk Class (iGRC) is a numerical value (ranging from 1 to 10) that reflects the baseline risk level posed by a UAS operation to people and infrastructure on the ground before any mitigations are applied. The iGRC is determined based on:
UAS Physical Characteristics:
Maximum characteristic dimension (e.g., wingspan for fixed-wing aircraft, blade diameter for rotorcraft, or maximum distance between blade tips for multi-copters).
Maximum speed at impact (the highest possible commanded airspeed as defined by the manufacturer).
Operational Environment:
Population density within the operational volume and the surrounding ground risk buffer.
Whether the flight occurs over sparsely populated, populated, or densely populated areas.
Understanding the iGRC is crucial, as it establishes the baseline risk before applying any mitigations. This classification is a key input in subsequent SORA steps.
Visualizing Ground Risk
The iGRC is also represented graphically to help visualize the risk footprint of a UAS operation.
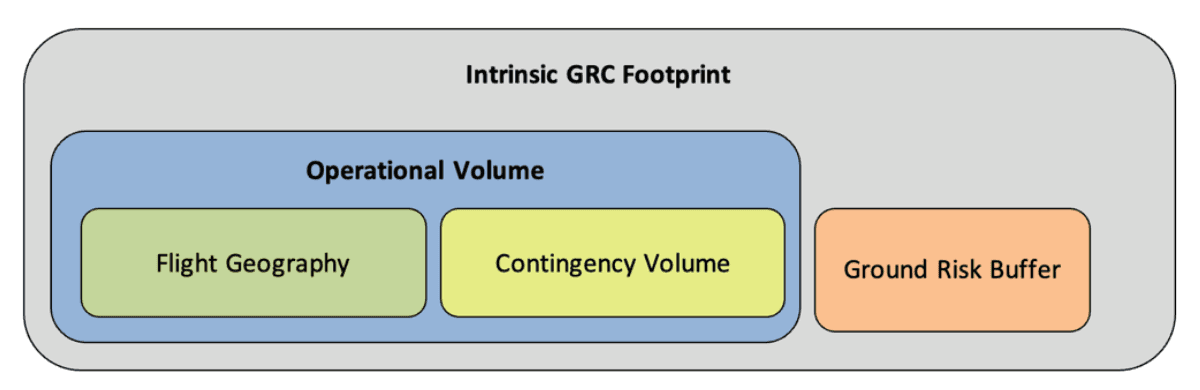
This figure highlights how different operational environments influence risk classification and the potential impact zones of an uncontrolled UAS.
Determining the iGRC
The iGRC is determined through a structured process that assesses both the operational footprint and environmental factors:
1. Identifying the iGRC Footprint
Flight geography: Define the area where the UAS is expected to operate under normal conditions.
Contingency volume: Calculate the additional volume of airspace that accounts for potential deviations from planned flight paths.
Initial ground risk buffer: Establish an initial safety buffer (the final ground risk buffer will be determined in Step #8 of SORA).
Population density analysis: Identify the highest population density within the iGRC footprint. If multiple segments of the flight pass through areas with varying population densities, the segment with the highest density should be used.
2. Evaluating UAS Physical Characteristics
Maximum Characteristic Dimension:
Fixed-Wing UAS: Measure wingspan.
Rotorcraft: Measure blade diameter.
Multi-Copters: Measure the maximum distance between blade tips.
Maximum Speed Considerations:
Defined as the highest possible commanded airspeed of the UA, as specified by the manufacturer.
Not limited to mission-specific maximum airspeed since operational reductions may not necessarily reduce the impact area.
Speed-reduction mitigations, which limit impact velocity, can be accounted for in Step #3 of the SORA process (SORA Annex B).
3. Population Density and Risk Assessment
Official mapping tools: Population density should be determined using officially designated maps with an appropriate grid size for the operation.
Alternative methods: If no suitable population density maps exist, qualitative descriptors (see the table below) may be used to estimate the population density in the operational volume and ground risk buffer.
Submission of custom maps: In certain cases, authorities may allow applicants to submit their own population density maps if official sources are inadequate.
4. Adjustments to Population Density Estimates
If an applicant identifies inaccuracies in a static population density map, they may provide alternative data sources such as:
Other mapping products.
Satellite imagery.
On-site inspections.
Local expertise and historical data.
If approved by the competent authority, these alternative sources may be used to refine iGRC calculations.
Time-based adjustments: Considerations such as time-based restrictions (e.g., flying at night to reduce ground risk) are addressed in Step #3 of the SORA process.
5. Alternative Methods for iGRC Calculation
Operators may find that the default iGRC values are too conservative for their specific UAS operation.
In such cases, an applicant may apply a mathematical model, as defined in Annex F of SORA, to determine a more precise iGRC.
Operations beyond the scope of SORA: If an operation does not correspond to an existing iGRC category (i.e., grey cells on the reference table), it falls outside the scope of SORA and should be considered under the certified category.
Since exact population density data is not always available, qualitative descriptors can help estimate the density of people in the operational area. These estimations are crucial in assigning the correct iGRC.
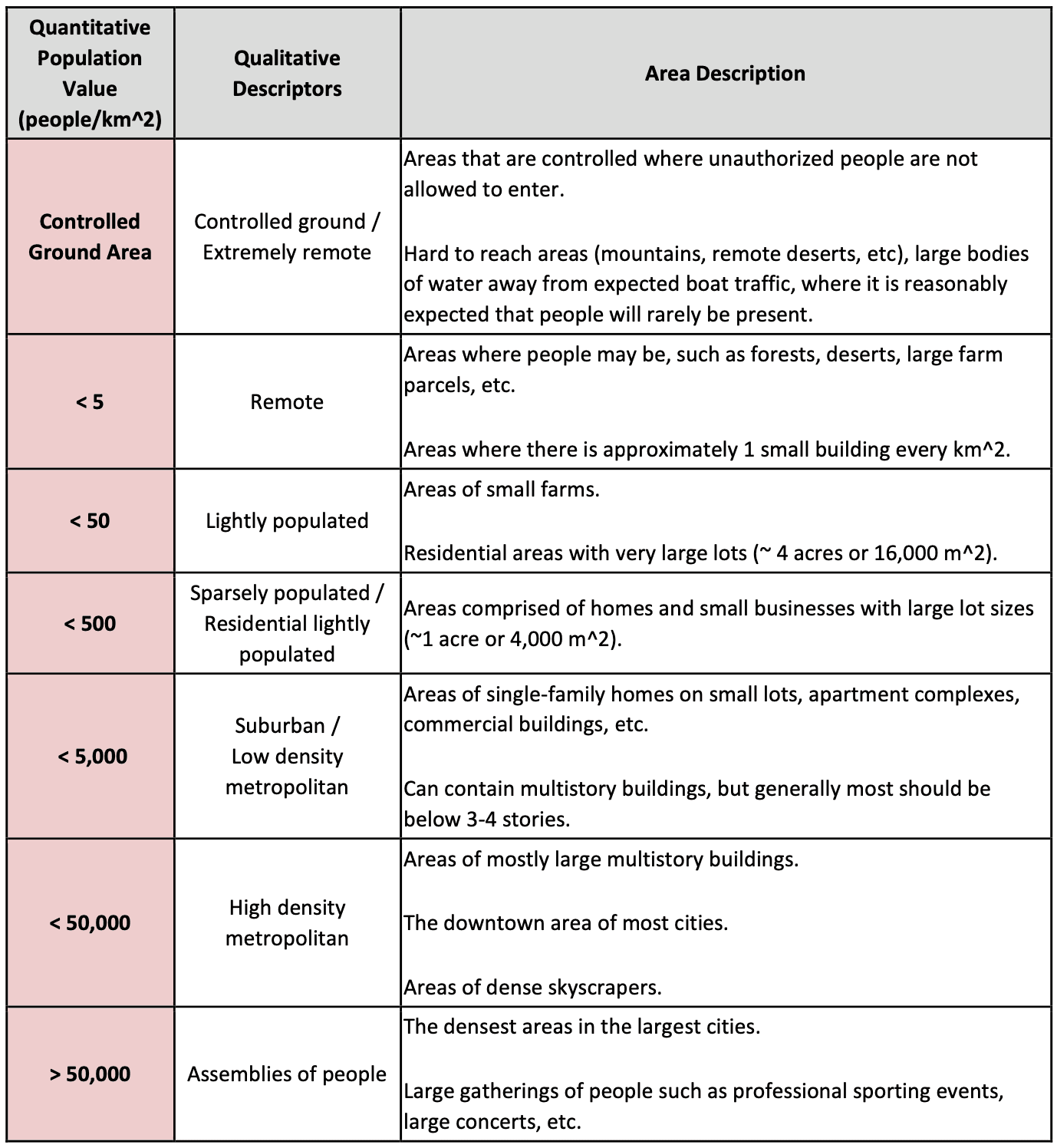
For example:
Sparse areas include remote locations, forests, and industrial zones with minimal human presence.
Populated areas include suburban neighborhoods and parks with occasional crowds.
Densely populated areas cover city centers, stadiums, and mass gatherings.
By overlaying UAS operational volumes onto population density maps, operators can make informed decisions about risk levels and necessary mitigations.

Conclusion
Step 2 of the SORA process, determining the Intrinsic Ground Risk Class (iGRC), provides the foundation for evaluating the potential impact of a UAS operation on people and property. Understanding iGRC classification allows operators to:
Identify the baseline risk level of their operation.
Establish necessary mitigation measures.
After determining the iGRC, strategic mitigations are applied to reduce the ground risk, ultimately leading to the final ground risk class (GRC).
At AirHub Consultancy, we help professional drone operators navigate the complexities of risk assessment and regulatory compliance. The AirHub Drone Operations Platform provides tools for determining the density of people on the ground and identifying other potential hazards, such as critical infrastructure and No-Fly Zones, to enhance situational awareness and safety planning.
Stay tuned for the next blog in our SORA series, where we explore how to apply mitigations to reduce ground risk effectively.